All-Terrain Hex-Limbed ExtraTerrestrial Explorer (ATHLETE)
ATHLETE is a hexapod robot developed by the Jet Propulsion Laboratory for transport of heavy payloads on the surface of a planetary body like the moon. The original ATHLETE had 6 legs with 6 joints each. A later version, designated TriATHLETE added a 7-th joint to each leg to increase height and enable self-deployment from a lander. TriATHLETE also had a split chassis (two halves, each with 3 legs), such that a cargo pallet could be picked up in a modular way.
I participated in the ATHLETE project while doing my PhD work at Stanford University, as an intern at the NASA Ames Research Center. My doctoral work ended up focusing on gait optimization for ATHLETE, to prevent excessive torques on any one joint (tested successfully on the robot).

The ATHLETE robots during testing at Dumont Dunes in California

Field testing of ATHLETE walking gaits at the Mars Yard at JPL (Daniel doing cable management)

ATHLETE during D-RATS 2010 field testing.

The TriATHLETE robot holding a habitat module.
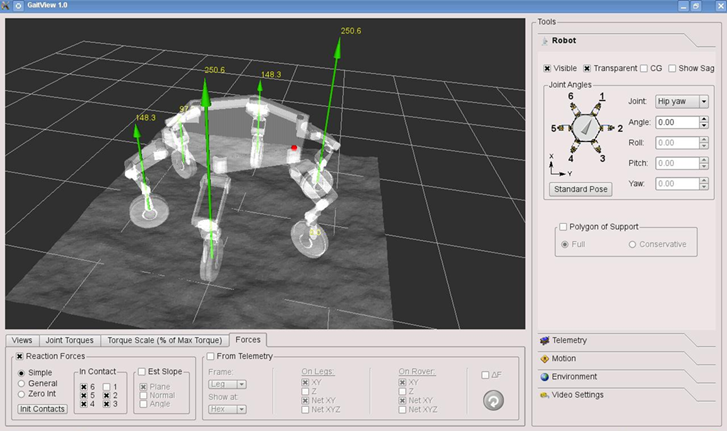
Screenshot of GaitView, a simulation tool I developed to analyze walking gaits for ATHLETE.
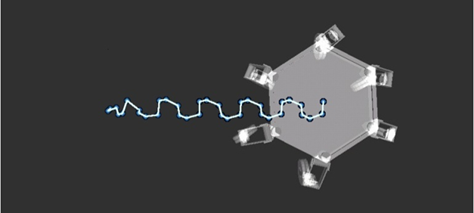
Body motion for a torque-optimized gait.